Presented at ICPRAM 2026 in Marbella, Spain
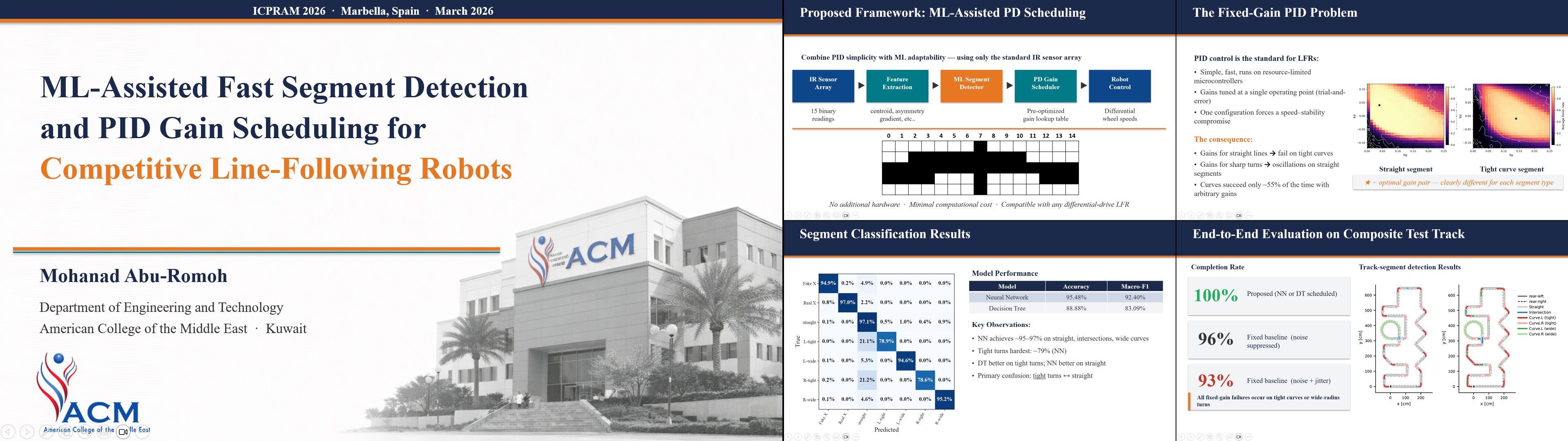
Presented paper #84 “ML-Assisted Fast Segment Detection and PID Gain Scheduling for Competitive Line-Following Robots” at the 15th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2026), held in Marbella, Spain.
Read More ›The paper proposes an ML-assisted framework that combines fast IR sensor-based track segment detection with PID gain scheduling for competitive line-following robots. The approach achieves a 100% completion rate on composite test tracks using a Neural Network scheduler, outperforming fixed-gain baselines. A participation and presentation certificate was awarded by the ICPRAM 2026 Secretariat.